 International
International Singapore
Singapore Malaysia
Malaysia Thailand
Thailand Vietnam
Vietnamรถเข็นของคุณว่างเปล่า!

สร้างแขนกล Robotic Arm ด้วยชุด EDU:BIT
- Nuttanon Wuttirottaworn
- 11 May 2024
- Tutorial
- Beginner
- 422
เราจะสร้างแขนกลสำหรับควบคุมให้จับวัตถุต่างๆได้อย่างง่ายๆ ด้วยชุดการเรียนรู้ EDU:BIT โดยการ DIY จากไม้ไอติม และยังได้เรียนรู้การใช้งาน Servo Motor 3 ตัวในโปรเจ็กต์เดียวอีกด้วย
ลิงก์สำหรับโค้ดตัวอย่าง : https://makecode.microbit.org/S12510-28685-60697-92935
การเชื่อมต่ออุปกรณ์

คำอธิบายโค้ด
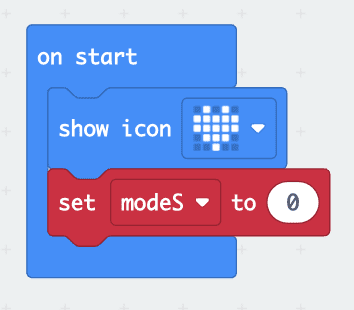
on start เมื่อโปรแกรมเริ่มทำงานให้แสดง icon รูปหัวใจ และกำหนดให้ตัวแปรชื่อ modeS มีค่าเท่ากับ 0
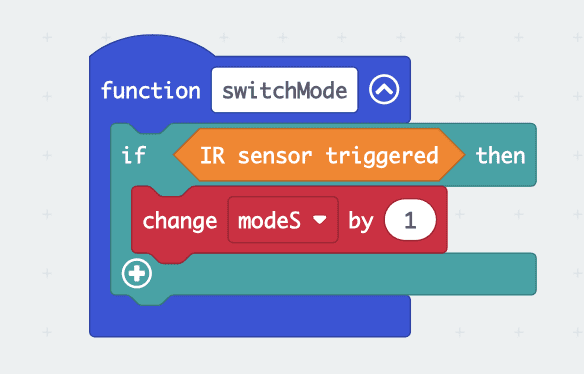
ฟังก์ชัน switchMode มีเงื่อนไข if เมื่อ IR Bit ทริกเกอร์ให้เพิ่มค่าของตัวแปร modeS ขึ้นครั้งละ 1
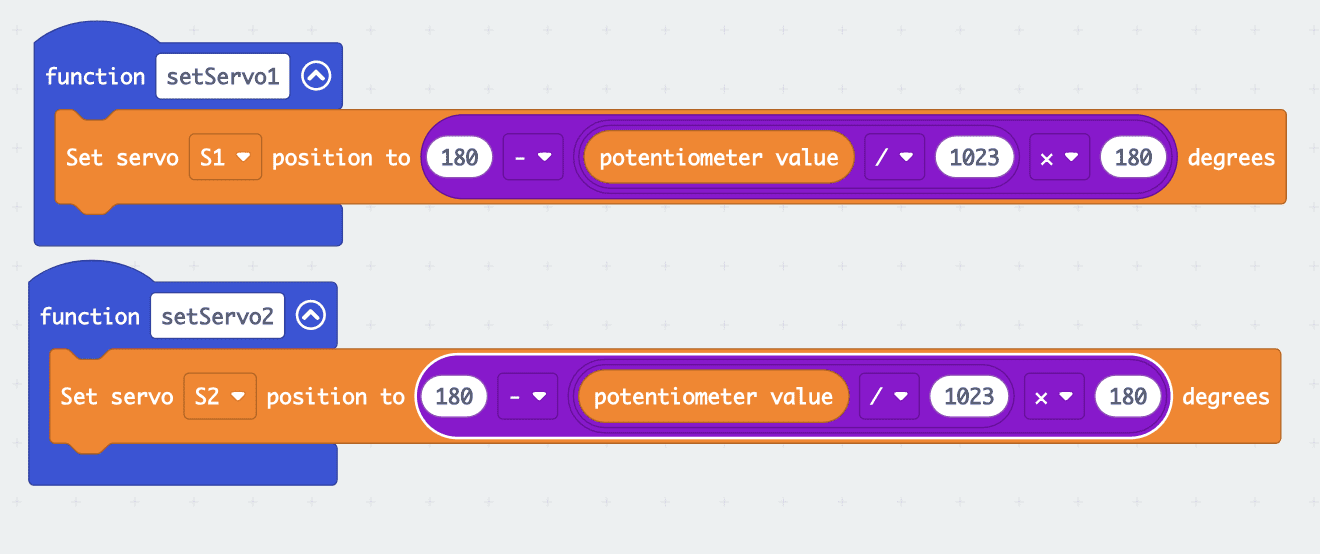
ฟังก์ชัน setServo1 กำหนดให้ตำแหน่งของ servo S1 มีค่าเท่ากับ 180 - ((ค่าที่ได้จากการหมุน Potentio Bit / 1023) x 180)
ฟังก์ชัน setServo2 กำหนดให้ตำแหน่งของ servo S2 มีค่าเท่ากับ 180 - ((ค่าที่ได้จากการหมุน Potentio Bit / 1023) x 180)
*ใช้ 180 - ((ค่าที่ได้จากการหมุน Potentio Bit / 1023) x 180) เพื่อให้ Potentio Bit หมุนไปทางเดียวกับ Servo Motor
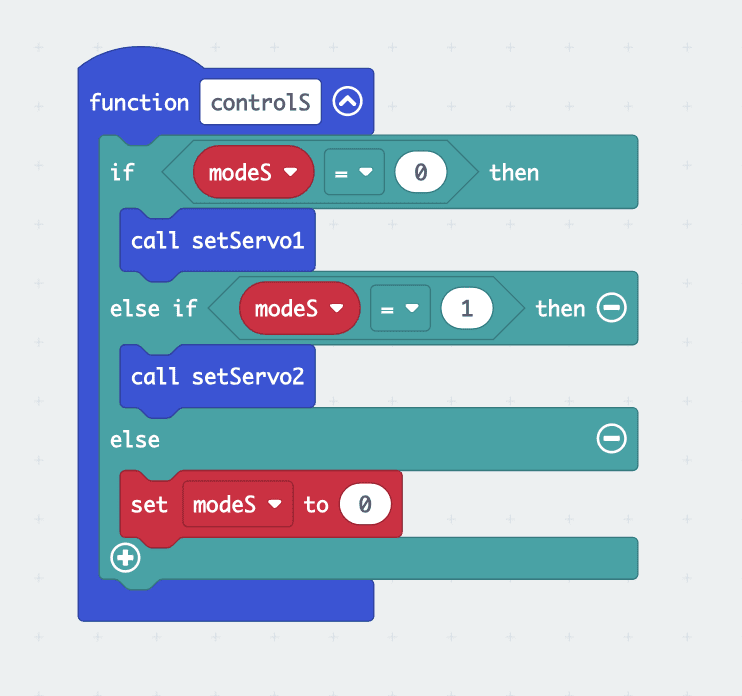
ฟังก์ชัน controlS เงื่อนไข if ถ้า modeS เท่ากับ 0 จะให้ฟังก์ชัน setServo1 ทำงาน เงื่อนไขต่อมาถ้า modeS เท่ากับ 1 จะให้ฟังก์ชัน setServo2 ทำงาน และหากไม่เข้าเงื่อนไขใดเลยจะให้ modeS มีค่าเท่ากับ 0
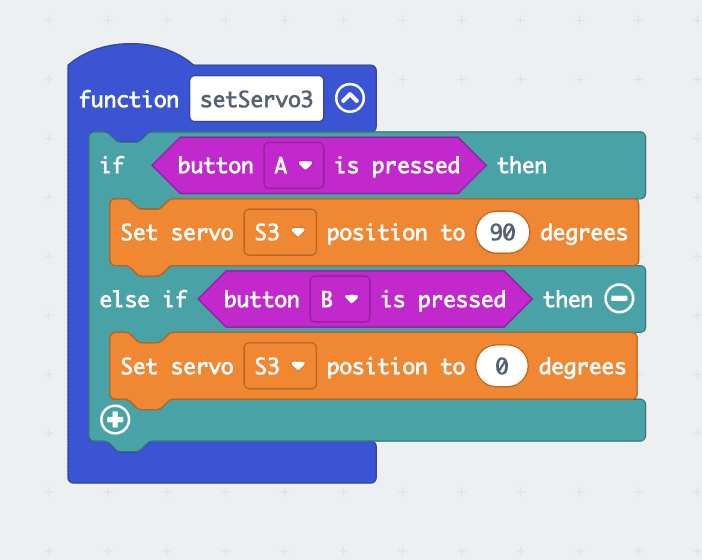
ฟังก์ชัน setServo3 เงื่อนไข if เมื่อกดปุ่ม A กำหนดให้ servo S3 อยู่ที่ตำแหน่ง 90 องศา คือการหุบมือจับเข้า และเมื่อกดปุ่ม B กำหนดให้ servo S3 อยู่ที่ตำแหน่ง 0 องศา คือการอ้ามือจับออก
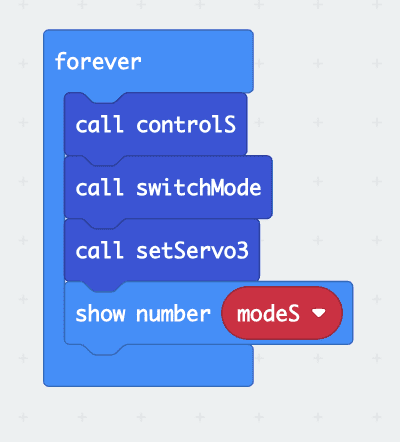
forever จะให้การทำงานของฟังก์ชัน controlS, switchMode, setServo3 ทำงานอยู่ตลอดเมื่อเริ่มการทำงาน และให้แสดงค่าของ modeS อยู่ตลอดด้วย
อุปกรณ์ฮาร์ดแวร์
-268x268.png "EDU:BIT Training & Project Kit for micro:bit") Out Of Stock
Out Of StockEDU:BIT Training & Project Kit for micro:bit
THB1,900.00 THB1,775.70
x 1 หน่วย
-268x268.jpg "Analog Micro Servo 9g (3V-6V)")
Analog Micro Servo 9g (3V-6V)
THB87.00 THB81.31
x 1 หน่วย